
































































Основные моменты, на которые нужно обратить внимание, при появлении вибрации и посторонних звуков в работе шагового двигателя
Шаговые двигатели имеют дискретные положения, в которые может перемещаться ротор. Из-за инерции ротора, когда шаговый двигатель делает шаг, он слегка отклоняется от своей цели и колеблется, прежде чем достигнет целевой точки. Когда двигатель движется непрерывно, колебания ротора будут происходить с определенной частотой. Как только частота совпадет с собственной частотой двигателя, колебания станут резонансными и вызовут шум. Когда резонанс перекрывает магнитное поле между статором и ротором, двигатель, скорее всего, потеряет синхронизацию. Резонансная частота двигателя может быть моделирована следующим уравнением:

Где K - жесткость крутящего момента, а J - инерция. Регулируя этот параметр, мы можем уменьшить вибрацию двигателя. Ниже приводится краткое описание методов снижения вибрации и того, как они снижают резонанс.
Существует множество способов избежать резонанса: просто изменить скорость работы или применить микрошаг. Следующий список представляет собой обзор различных способов уменьшения резонанса.
Параметры работы шагового двигателя:— Используйте другую скорость работыФизические параметры шагового двигателя:
— Используйте микрошаг
— Изменение тока (в сторону уменьшения)
— Применить механический демпфер
— Изменить инерцию нагрузки (например: применить планетарный редуктор)
— Изменение индуктивности двигателяБолее подробные объяснения каждого метода можно найти далее:
— Изменение инерции ротора
— Изменение воздушного зазора двигателя
— R-обмотка, Т-соединение
Электрические Настройки:
1. Избегайте коммутации на резонансных частотах
Резонанс обычно возникает при определенной скорости работы двигателя. Когда скорость работы будет соответствовать резонансной скорости, возникнет вибрация, в результате чего будет снижена производительность двигателя. Самым простым способом избежать резонанса может быть простое изменение скорости работы, чтобы двигатель не достиг своей резонансной точки. Также, выбирайте шаговые двигатели хорошего качества, резонансная частота может возникнуть даже в некачественных подшипниках ротора.
2. Микрошаг уменьшает колебания
Катушки в шаговом двигателе в режиме полного шага запитываются поочередно, поэтому ротор двигателя будет иметь тенденцию отклоняться от своего положения из-за резкого прыжка магнитного потока на соседнюю пару катушек. Микрошаг может более плавно перемещать поток между катушками статора за счет уменьшения энергии возбуждения катушек и постепенной передаче потока с одной пары на вторую. Это приводит к уменьшению вибрации и шума, а резонанс будет устранен.
3. Уменьшение тока для уменьшения "жесткости" крутящего момента (dt/dθ)
Двигатель будет выдавать меньший крутящий момент при меньшем входном токе. В результате для перемещения ротора будет производится (драйвером) меньше энергии (т. е. меньше отношение dt/dθ, жесткость крутящего момента). Многие низкоскоростные режимы будут работать более плавно.
Но уменьшение тока приведет к уменьшению магнитного потока и выходного крутящего момента. Поэтому данный метод применим при использовании привода с хорошим запасом по моменту.
4. Настройка параметров затухания тока драйвера
Часто быстрое затухание тока уменьшает вибрацию и резонансы. Когда драйвер переключает направление тока, ток будет затухать переходным образом, а остаточный ток будет мешать току, установленному в другом направлении. Медленное затухание тока вызовет большую пульсацию крутящего момента, следовательно, возникнет больше вибрации.
Быстрое затухание тока может устранить помехи между двумя сигналами тока, посылаемыми драйвером двигателя, и уменьшить вибрацию во время работы двигателя.

Рисунок 1. Текущий сигнал от драйвера двигателя
5. Увеличение индуктивности приведет к смещению гармоник вниз по частоте
Когда двигатель работает, резонанс будет индуцировать переменный ток в обмотке двигателя, и переменный ток будет мешать постоянному току, проходящему через обмотку. За счет увеличения индуктивности обмотка двигателя сможет противодействовать резонансу или снизить частоту резонанса.
6. Реализация R-обмотки с включенными двумя фазами

Рисунок 2: диаграмма R-обмотки
Для гибридных шаговых двигателей статор имеет две фазы. И катушки намотки расположены на расстоянии 90 ° друг от друга. Для традиционной обмотки шагового двигателя фазовые углы для каждого шага увеличиваются на 45°: 0°, 45° 90°, 135°, 180°, 225°, 270°, 315°. Когда две фазы находятся на расстоянии 45° друг от друга, фазы A и B включены. Когда две фазы находятся на расстоянии 90° друг от друга, включается только одна фаза. Поскольку распределение тока в режиме включения одной фазы и в режиме включения двух фаз различно, время установления этих двух режимов различно. Резонанс, скорее всего, возникнет из-за неравномерного времени включения обмоток на каждом шаге.R-обмотки могут устранить положение включения 1 фазы, установив новый фазовый угол на: 22.5°, 67.5°, 112.5°, 157.5°, 202.5°, 247.5°, 292.5°, 337.5°. При постоянном включении двух фаз драйвер не будет подавать 100% ток только в одну фазу. Включение обеих фаз может сделать время установления для каждого шага одинаковым, в результате чего уменьшается резонанс.
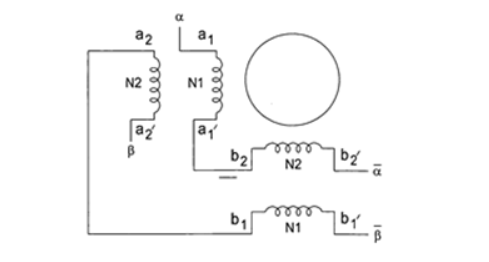
Рисунок 3.Схема намотки R-образной обмотки
R-обмотка была изобретена Тедом Лином. Двигатель с R-обмоткой имеет две катушки на полюс, и каждая катушка имеет разные витки. Эти два набора проводов намотаны последовательно друг с другом, но конец первой катушки соединен с концом второй катушки. Такая конструкция позволяет сдвигать фазу двигателя на 22,5 градуса, что приводит к снижению шума и вибрации двигателя.
7. Реализация T-соединения
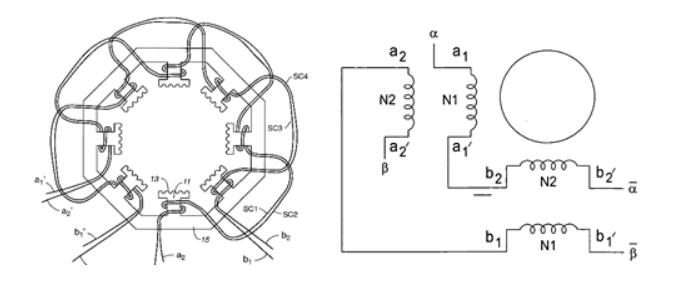
Рисунок 4. Настройка намотки Т-образного соединения
Т-образное соединение также приводит к тому, что постоянно включены 2 фазы. Результат T-соединения аналогичен R-обмотке: включение обеих фаз может снизить вибрацию. Кроме того, уровень индуктивности Т-образного соединения находится между последовательным и параллельным соединением. Таким образом, Т-образное соединение может обеспечить уровень производительности между последовательным соединением и параллельным соединением: более высокий крутящий момент при низкой скорости по сравнению с параллельным соединением и более высокий крутящий момент при высокой скорости по сравнению с последовательным соединением.8. Увеличение количества фаз
Двигатель с большим количеством фаз будет иметь меньший угол шага, аналогичный микрошаговому режиму и может уменьшить энергию возбуждения для вращения ротора. По мере уменьшения энергии возбуждения резонансы будут устраняться.
2-фазный двигатель имеет 8 магнитных полюсов, в то время как 5-фазный двигатель имеет 10 полюсов. 5 - фазный двигатель имеет 2 полюса на фазу, поэтому ротор будет перемещаться на 1/10 шага зуба статора, чтобы перейти на следующую фазу. В результате 5-фазный двигатель имеет 500 шагов на оборот и 0,72° на шаг. Более высокое разрешение вращения требует меньшей энергии возбуждения для вращения ротора, следовательно, меньшего превышения скорости ротора.
Если будет реализован микрошаг, 5-фазный двигатель сможет работать с еще более высоким разрешением, а вибрация будет в значительной степени снижена.
Механическое демпфирование:
1. Установка механического демпфера

Рисунок 5. Механический демпфер NEMA 23.
Механический демпфер на шаговом двигателе может добавить дополнительную инерцию на валу, а также, помочь поглотить вибрацию и обеспечить стабильный эффект демпфирования. Фланцевое крепление также может поглощать вибрацию.2. Регулировка инерции ротора
Резонанс двигателя может быть определен соотношением
, где K-жесткость крутящего момента, а J-инерция. Диапазон резонанса может изменяться из-за демпфирующего эффекта инерции нагрузки. Регулируя инерцию ротора путем изменения материалов, размеров (например, большей длины ротора) или конструкции (например, конструкция полого вала “автомобильное колесо”, показанная на рисунке 6), мы можем сдвинуть точку резонанса, чтобы уменьшить вибрацию.
Рисунок 6. Дизайн ротора “Автомобильное колесо”.
3. Регулировка воздушного зазора для увеличения или уменьшения жесткости крутящего момента
Воздушный зазор между ротором и зубом статора связан с величиной крутящего момента, который может генерировать двигатель. Изменяя расстояние воздушного зазора, мы можем регулировать жесткость двигателя по крутящему моменту. В результате мы можем сдвинуть точку резонанса, чтобы избежать вибрации.
4. Изменение инерции нагрузки
Инерция - это сопротивление объекта ускорению или замедлению. Если двигатель под нагрузкой, аналогичную механическому демпферу, инерция ротора будет намного больше, а колебания существенно уменьшатся.